
价格: ¥ 699
最后更新: 2021-10-10 19:26:37
演示地址: 点击查看
安装费: 免费
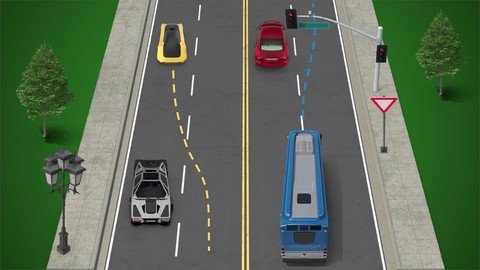 课程介绍 世界在变!技术正在改变!自动化在我们社会中的普及速度超出了任何人的预期。我们技术进步的最前沿是系统的自主性。自动驾驶汽车和其他自动驾驶汽车很可能成为我们日常生活的一部分。您希望如何理解并能够设计这些自动驾驶汽车?你想如何理解它背后的数学?欢迎!在本课程中,您将接触到最强大的技术之一,它能够精确可靠地引导和控制系统。你将要设计、掌握和应用: 状态空间系统和运动方程形式的数学模型 PID 控制器到一个简单的磁力列车,需要捕捉随机从天上掉下来的物体 模型预测控制器 (MPC) 用于自动驾驶汽车,在直线道路上以恒定的前进速度进行简单的换道操作。 您将学习建模、PID 和 MPC 的基本原理和逻辑,这将使您能够将其应用于将来可能遇到的其他系统。 解决工程问题时需要三样东西:直觉、数学、编码!你无法选择——你真的需要它们。完成本课程后,您将通过这 3 种方式掌握建模、PID 和 MPC。那是承诺! 我很高兴有你参加我的课程,我迫不及待地想教你我所知道的。 让我们开始吧! 第二季课程:《自动驾驶汽车全方位跟踪控制系统建模、预测控制和Python建模视频教程》 MP4 | 视频:h264,1280×720 | 音频:AAC,44.1 KHz 语言:英语 | 大小:6.95 GB | 时长:18h 40m 您将学习 系统的数学建模,将模型 重新构建为状态空间方程, 将 PID 控制器应用于系统(简单的磁力列车捕捉对象), 将模型预测控制 (MPC) 应用于系统(自动驾驶汽车:变道操纵) 要求 基本微积分:函数、导数、积分 向量-矩阵乘法 本课程适用于: 科学和工程专业的学生 工作的科学家和工程师 控制工程爱好者 猜你喜欢数据科学实践视频教程:自动化机器学习(Auto ML) (1.000)Python机器学习开发技能训练视频教程+5个动手实战项目 (1.000)Robocorp, Python & Robot框架全栈RPA机器人流程自动化开发视频教程 (1.000)Robocorp & Python机器人自动化处理RPA全栈开发视频教程 (0.934)机器人流程自动化RPA & 人工智能自动化Python软件开发教程 (0.934) Python 自动化 视频教程 本站大部分资源收集于网络以及网友投稿,本不保证资源的完整性以及安全性,请下载后自行测试。 本站资源仅供下载者学习技术,版权归资源原作者所有,请在下载后24小时之内自觉删除。 本站资源仅供下载者学习IT编程开发技术,请遵守国家法律法规,严禁用于非法用途。 若作商业用途,请购买正版,由于未及时购买正版发生的侵权行为,与本站无关。 如您是版权方,本站源码有侵犯到您的权益,请邮件联系pass2001@163.com 删除,我们将及时处理! 云创源码 » 自动驾驶汽车应用控制系统设计视频教程: Math + PID + 模型预测控制器MPC (updated 7/2021) 云码哥 SVIP 分享到: 发表评论 取消回复要发表评论,您必须先登录。
课程介绍 世界在变!技术正在改变!自动化在我们社会中的普及速度超出了任何人的预期。我们技术进步的最前沿是系统的自主性。自动驾驶汽车和其他自动驾驶汽车很可能成为我们日常生活的一部分。您希望如何理解并能够设计这些自动驾驶汽车?你想如何理解它背后的数学?欢迎!在本课程中,您将接触到最强大的技术之一,它能够精确可靠地引导和控制系统。你将要设计、掌握和应用: 状态空间系统和运动方程形式的数学模型 PID 控制器到一个简单的磁力列车,需要捕捉随机从天上掉下来的物体 模型预测控制器 (MPC) 用于自动驾驶汽车,在直线道路上以恒定的前进速度进行简单的换道操作。 您将学习建模、PID 和 MPC 的基本原理和逻辑,这将使您能够将其应用于将来可能遇到的其他系统。 解决工程问题时需要三样东西:直觉、数学、编码!你无法选择——你真的需要它们。完成本课程后,您将通过这 3 种方式掌握建模、PID 和 MPC。那是承诺! 我很高兴有你参加我的课程,我迫不及待地想教你我所知道的。 让我们开始吧! 第二季课程:《自动驾驶汽车全方位跟踪控制系统建模、预测控制和Python建模视频教程》 MP4 | 视频:h264,1280×720 | 音频:AAC,44.1 KHz 语言:英语 | 大小:6.95 GB | 时长:18h 40m 您将学习 系统的数学建模,将模型 重新构建为状态空间方程, 将 PID 控制器应用于系统(简单的磁力列车捕捉对象), 将模型预测控制 (MPC) 应用于系统(自动驾驶汽车:变道操纵) 要求 基本微积分:函数、导数、积分 向量-矩阵乘法 本课程适用于: 科学和工程专业的学生 工作的科学家和工程师 控制工程爱好者 猜你喜欢数据科学实践视频教程:自动化机器学习(Auto ML) (1.000)Python机器学习开发技能训练视频教程+5个动手实战项目 (1.000)Robocorp, Python & Robot框架全栈RPA机器人流程自动化开发视频教程 (1.000)Robocorp & Python机器人自动化处理RPA全栈开发视频教程 (0.934)机器人流程自动化RPA & 人工智能自动化Python软件开发教程 (0.934) Python 自动化 视频教程 本站大部分资源收集于网络以及网友投稿,本不保证资源的完整性以及安全性,请下载后自行测试。 本站资源仅供下载者学习技术,版权归资源原作者所有,请在下载后24小时之内自觉删除。 本站资源仅供下载者学习IT编程开发技术,请遵守国家法律法规,严禁用于非法用途。 若作商业用途,请购买正版,由于未及时购买正版发生的侵权行为,与本站无关。 如您是版权方,本站源码有侵犯到您的权益,请邮件联系pass2001@163.com 删除,我们将及时处理! 云创源码 » 自动驾驶汽车应用控制系统设计视频教程: Math + PID + 模型预测控制器MPC (updated 7/2021) 云码哥 SVIP 分享到: 发表评论 取消回复要发表评论,您必须先登录。 | 0 (0%) 好评 | 0 (0%) 中评 | 0 (0%) 差评 |







关于我们| 服务条款| 隐私政策| 帮助中心| 金币说明| 买家必读| 商家必读| 意见反馈
Powered by Wabc (wabc.cc) 粤ICP备2020133925号
Copyright © 2024 www.wabc.cc All Rights Reserved

WAP



